 da
da de
de en
en es
es it
it nb
nb nl
nl pt
pt sv
sv fi
fi- Page d'accueil
- Actualité
- Capteurs d'angle de braquage & capteurs d'accélération : un guide complet
Capteurs d'angle de braquage & capteurs d'accélération : un guide complet
Le capteur d'angle de braquage est le plus souvent monté là où l'on s'y attend : derrière le volant, au-tour de la colonne de direction. De temps à autre, un constructeur décide de placer le capteur au voisi-nage du boîtier de direction, mais cela est relativement rare. Différents types sont utilisés. Le type basé sur l'effet Hall est le plus courant, mais on rencontre encore des versions à contact glissant. De plus, il existe aussi des capteurs optiques numériques qui émettent un signal spécifique de l'angle de braquage mesuré à un instant donné. Nous évoquerons brièvement les différences entre ces capteurs.
Analogique avec contact glissant
Le capteur d'angle de braquage analogique se compose de deux potentiomètres, appelés également diviseurs de tension. Ces diviseurs de tension utilisent un pont de résistance fixe, souvent en carbone, traversé par le courant. Un contact glissant mobile se déplace sur ce pont de résistance et la position à laquelle il se trouve à un instant donné détermine la grandeur de la tension qui est transmise. Il existe des versions qui fonctionnent avec une tension de référence de 5 volts et des versions fonctionnant avec 12 volts. Au demeurant, le deuxième diviseur de tension n'est pas prévu comme moyen de con-trôle mais sert à déterminer le sens de rotation du volant : vers la gauche ou vers la droite. En plaçant les diviseurs de tension en sens opposé, la différence de tension entre les deux permet de déterminer si le volant tourne dans le sens horaire ou antihoraire. La tension transmise dans la position zéro (lorsque le volant et les roues sont dans l'axe du véhicule) peut différer selon le diviseur de tension. Cette diffé-rence est intentionnelle, pour permettre de mesurer si le capteur d'angle de braquage fonctionne cor-rectement. Il existe à présent un très grand nombre de variantes de ce type de capteur d'angle de bra-quage et nous ne pouvons donc malheureusement pas donner de valeurs de mesure spécifiques.
Il arrive que les contacts glissants s'usent au point de rendre impossible un contact permanent. Pour cette raison, les contacts glissants sont de moins en moins souvent utilisés dans l'industrie auto-mobile. Si un capteur d'angle de braquage de ce type tombe en panne ou perd le signal par intermit-tence, contrôlez donc en premier lieu les contacts glissants.
Effet Hall
Les capteurs d'angle de braquage qui utilisent l'effet Hall (par exemple LWS5 et LWS6 de Bosch) fonc-tionnent sans contact et ne connaissent donc pas de problèmes d'usure. Comme dans le cas des cap-teurs de roue actifs, ces capteurs d'angle de braquage utilisent un anneau magnétique multipolaire. Les capteurs à effet Hall (effectivement, ils sont plusieurs) détectent tout mouvement avec une précision de 1,5 degré et adressent des signaux carrés au calculateur. La phase du signal de chaque capteur à effet Hall est différente, de sorte que le sens de rotation peut être défini immédiatement et qu'il est possible d'exclure que le capteur ne fonctionne pas convenablement. La suite est un calcul de l'angle de bra-quage instantané, du sens de rotation et de la vitesse de rotation. Le résultat est converti en un signal CAN et adressé immédiatement au calculateur d'ESP.
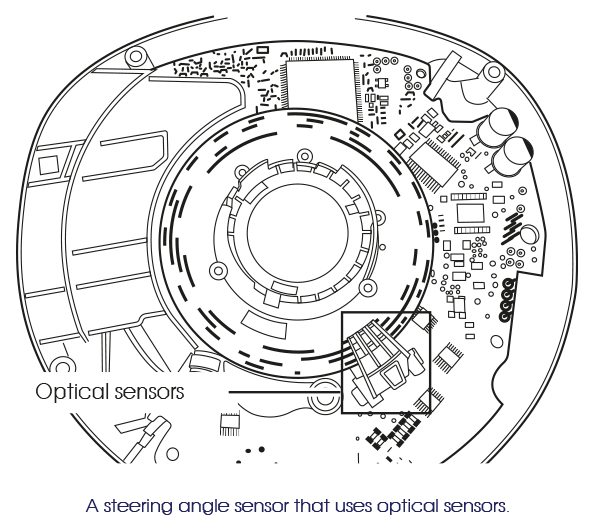
Optique
C'est surtout Mercedes-Benz qui, durant une certaine période, était un fervent utilisateur des capteurs d'angle de braquage optiques. Ce type de capteur génère aussi plusieurs signaux carrés, mais est basé sur l'optique au lieu du magnétisme. En utilisant plusieurs voies ayant chacune une propre configuration de trous, différents signaux sont créés. Ces signaux sont comparés par le contrôleur et le résultat est converti en un signal numérique utilisable.
À première vue, on pourrait penser que ce type de capteur fonctionne aussi bien qu'un capteur Hall. Mais les capteurs optiques ont un ennemi redoutable : les salissures. Une petite couche de poussière peut déjà suffire à bloquer le faisceau lumineux, perturbant ainsi le signal. Pour cette raison, les cap-teurs optiques conviennent en réalité seulement aux environnements à l'abri des impuretés.
En cas de problèmes avec des capteurs optiques, contrôlez donc toujours d'abord s'ils sont cou-verts de poussière ou d'autres salissures. Chasser ces salissures en soufflant de l'air peut parfois suffire à supprimer le problème !
Étalonnage
L'étalonnage du capteur d'angle de braquage est facile à réaliser à l'aide d'un bon appareil de diagnos-tic. Il suffit souvent de tourner le volant complètement une seule fois vers la gauche puis vers la droite pour réaliser l'apprentissage du capteur. Il existe aussi des capteurs à auto-apprentissage. Dans ce cas, il suffit de mettre le contact et tourner le volant complètement une seule fois vers la gauche puis vers la droite. Le système ESP peut dans de nombreux cas détecter aussi automatiquement si un étalonnage est nécessaire, en comparant les valeurs du capteur d'angle de braquage avec celles des différents cap-teurs d'accélération. Si le système remarque que la voiture roule continuellement tout droit, mais que l'angle de braquage dévie excessivement, l'ESP se désactive et le voyant d'avertissement s'allume.
Direction assistée électrique
Le capteur d'angle de braquage n'est pas seulement utilisé pour informer l'ESP, mais aussi pour la régu-lation de la direction assistée électrique. Un moteur électrique assiste le mouvement de direction dès qu'un changement est détecté dans l'angle de braquage. Avec ce système, une assistance hydraulique est superflue. L'avantage de ce système réside non seulement dans le gain d'espace et de poids, mais également dans les possibilités de réglage de la direction. Il permet par exemple de créer une sensation de conduite confortable ou au contraire sportive. Il peut aussi s'avérer très pratique pour faire un cré-neau ; pensez par exemple au bouton « City » de Fiat, qui permet de manœuvrer avec une extrême faci-lité. En revanche, un désavantage de l'assistance électrique est le manque de sensations : du fait que le moteur électrique détermine le mouvement, on ressent à peine dans le volant les réactions des roues sur la chaussée.
Astuce pour BMW Série 3 E90 : brefs messages d'erreur DSC
Supposons : de temps en temps, un message DSC apparaît brièvement sur le tableau de bord, mais il disparaît aussi soudainement qu'il est apparu. La lecture des codes d'erreur ne fonctionne pas, car l'er-reur n'est pas enregistrée. Pourtant, le message revient de temps en temps. Donc que fais-tu? La seule option que vous avez est de vérifier tout ce qui peut causer des plaintes intermittentes. Un conseil que l'on peut donner dans le cas de la BMW Série 3 E90 : vérifiez le capteur d'angle de braquage. Il existe plusieurs cas connus où le capteur d'angle de braquage a été tellement altéré qu'il a causé ces plaintes. Nous ne savons pas pourquoi cela est si spécifique à l'E90.
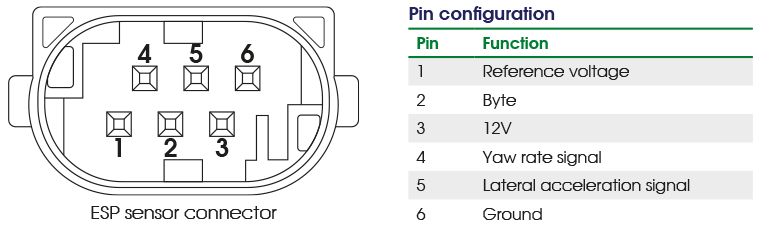
Capteurs d'accélération
En plus de l'angle de braquage, le calculateur d'ESP a aussi besoin de valeurs en temps réel qui l'infor-ment du mouvement que la voiture est en train d'effectuer. Les capteurs d'accélération sont prévus à cet effet. Ces capteurs se divisent en deux catégories : les capteurs d'accélération latérale et les cap-teurs de lacet. Dans la pratique cependant, vous ne les rencontrerez pratiquement jamais séparés : aus-si bien Continental que Bosch incorporent en effet ces capteurs dans un même boîtier. Nous allons prendre comme exemple le capteur du système ESP Bosch 5.7, un peu moins récent, pour expliquer le fonctionnement.
Astuce : Étalonnage des capteurs ESP
Important pour les systèmes avec ESP : après l'installation, tous les capteurs ESP doivent toujours être recalibrés. Le meilleur équipement de diagnostic universel aura cette fonction disponible. Sinon, les dysfonctionnements sont garantis.
Le capteur ESP utilise une alimentation électrique (12V), la masse et un multiplet (signal carré, 0 – 6,8 V). Le multiplet sert de moyen de contrôle et est réadressé avec le signal de sortie du capteur de lacet. D'autre part, le capteur de lacet utilise aussi une tension de référence (2,5 V). Le capteur de lacet in-fluence la polarité de cette tension de référence : positive pour un angle de lacet positif, négative pour un angle de lacet négatif. De ce fait, la sortie varie de 0,7 V à 4,3 V. Comme le multiplet de contrôle influe sur ce signal, le signal de sortie doit avoir l'aspect suivant :
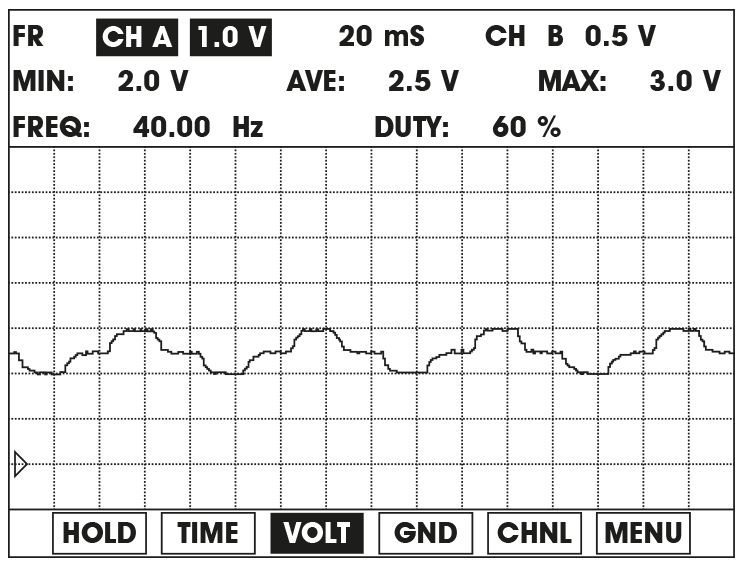
ATTENTION : Si le signal est rectiligne, cela signifie que le capteur est défectueux !
Le capteur d'accélération latérale n'utilise pas la tension de référence et le multiplet de contrôle. Le signal de sortie est rectiligne et varie de 0,5V à 4,5 V. Pour atteindre ces valeurs, une force gravitation-nelle de -1,5 G ou +3,5 G doit être produite.
Évolution
Bien que l'exposé précédent donne un bon aperçu du fonctionnement des capteurs ESP, beaucoup de choses sont en train d'évoluer. Comme les autres systèmes électroniques des véhicules, l'ESP passe progressivement des signaux analogiques aux messages CAN. Un réseau central unique offre en effet de nombreux avantages. Pour en citer deux exemples : le signal est disponible dans l'ensemble du véhi-cule et une énorme économie de câblage est obtenue. Il en résulte un gain en termes d'espace et de poids.
La technique a aussi évolué à l'intérieur des capteurs. Si l'on compare l'ESP Bosch 5.7 et l'ESP Bosch 8.0, les différences sont évidentes. Aussi bien le capteur d'accélération latérale que le capteur de lacet utili-sent à présent un élément piézoélectrique qui délivre une tension croissante à mesure que la force d'ac-célération augmente :
Une masse suspendue est placée au centre de l'élément piézoélectrique. Dès que la voiture accélère ou vire dans une direction donnée, la masse fait de même. La force qui est nécessaire pour déplacer cette masse de sa position de repos génère une certaine tension dans l'élément piézoélectrique. Il est proba-blement inutile d'expliquer que cette tension augmente à mesure que la masse s'éloigne davantage de sa position de repos.
Cette tension est convertie à son tour en un signal électrique. Un calcul intégrant les valeurs de l'accélé-ration latérale et de l'accélération rotationnelle permet de comparer aussi le mouvement de la voiture avec l'angle de braquage.
Un détail intéressant :
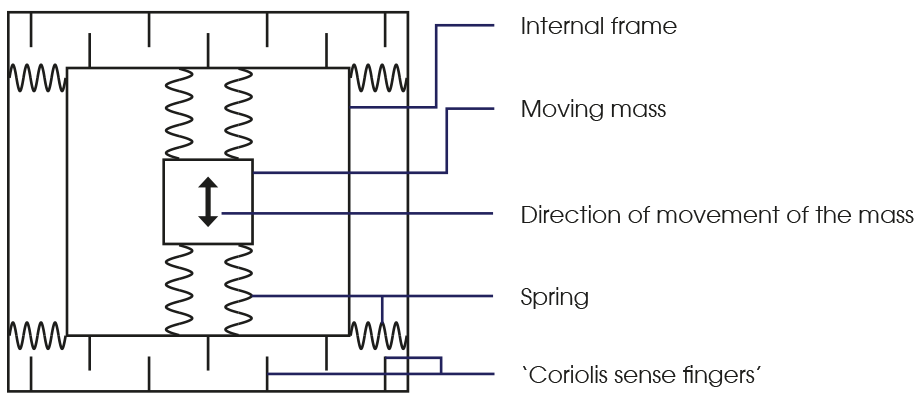
La nouvelle génération de capteurs de lacet est aussi appelée iMEMS : « integrated Micro Electro-Mechanical System » (en français : Microsystème électromécanique intégré). Grâce à cette technique, la dimension du capteur de lacet a pu être réduite à un point tel que l'intégration dans le calculateur ne pose plus aucun problème. Les calculateurs d'ABS modernes, comme certains types du MK60E d'ATE Teves, n'ont donc plus besoin de capteurs ESP externes. Réfléchissez bien à ce point en cas de pannes concernant l'ESP : la défaillance peut désormais aussi se trouver à l'intérieur du calculateur.
Ci-dessous une représentation schématique de ce type de capteur :
Astuce pour le code d'erreur 01423 - Yaw rate sensor
En cas de réglage de base / d'adaptation incorrect : effectuer à nouveau le réglage de base. En cas de panne du circuit électrique : vérifier le câblage du capteur de taux de lacet (G200) et vérifier la tension d'alimentation du capteur. Tout va bien ? Remplacez ensuite le capteur. Si le code d'erreur est toujours présent après le remplacement du capteur, veuillez contacter notre service client.
Direction active
Les voitures qui sont équipées d'un système de direction active, par exemple BMW et Mercedes-Benz, sont munies de deux capteurs ESP : un capteur principal sous le siège du conducteur et un capteur se-condaire sous le siège du passager avant. Le deuxième capteur est en grande partie semblable au cap-teur principal, mais a une résistance de charge (le capteur principal n'en a pas) et utilise un autre identi-fiant CAN. Ces capteurs ne sont donc pas interchangeables. Le système ESP utilise ces deux capteurs d'une façon nettement différente. Les valeurs transmises par le deuxième capteur sont utilisées pure-ment comme moyen de contrôle des valeurs issues du capteur principal. Le deuxième capteur ne peut donc pas reprendre la fonction du capteur principal. Dès qu'une différence entre les deux capteurs est mesurée, le système entre en mode de panne. D'autre part, les deux capteurs ont un fonctionnement passif : un signal est émis seulement si le calculateur du système ESP le demande. Comme indiqué pré-cédemment, cela a lieu heureusement toutes les 10 millisecondes.