 da
da de
de en
en es
es it
it nb
nb nl
nl pt
pt sv
sv fi
fi- Page d'accueil
- Actualité
- Comment Automotive Ethernet contribue au développement des contrôleurs de domaine
Comment Automotive Ethernet contribue au développement des contrôleurs de domaine
Il fut un temps où chaque unité de commande de la voiture fonctionnait de manière totalement autonome et disposait donc de ses propres capteurs et actionneurs. Ces capteurs et actionneurs étaient donc directement connectés à l'unité de contrôle. Simple et efficace. Cependant, à mesure que le nombre de capteurs, d'actionneurs et d'unités de commande augmentait, les faisceaux de câbles augmentaient également. Bientôt, il fallut littéralement des kilomètres de câble et la vue d'ensemble était difficile à trouver. Cela devait être mieux possible.
C’est pourquoi le réseau CAN a été introduit au début des années 1990. Les unités de contrôle pourraient soudainement échanger des informations entre elles, y compris des signaux provenant de capteurs. Une véritable révolution dans le monde automobile. Depuis, l’architecture réseau au sein d’un véhicule n’a cessé d’évoluer. Et avec l’arrivée des groupes motopropulseurs électriques et de la technologie autonome, des progrès encore plus importants sont garantis dans un avenir proche.

Mais cela signifie également que beaucoup de choses changeront dans la manière dont l’électronique est mise en œuvre dans un véhicule. Pour faire court : d’ici 10 ans, un contrôleur de domaine ou un supercalculateur sera en charge de toutes les fonctions de l’ensemble du groupe motopropulseur. L’ECU telle que nous la connaissons aujourd’hui assumera alors un rôle plus subordonné. Et à mesure que ces contrôleurs de domaine et les réseaux associés continuent de se développer, les unités de contrôle individuelles disparaîtront lentement (oui, également l'ECU), jusqu'à ce qu'en fin de compte, seule une poignée de contrôleurs de domaine ou de supercalculateurs soient aux commandes.
Mais avant que cela n’arrive, nous souhaitons expliquer un peu plus le réseau qui jouera un rôle important à cet égard. Car même si l’Ethernet automobile est disponible depuis un certain temps, son ingéniosité continue de croître.
Le début : une passerelle centrale
L'industrie automobile est continuellement à la recherche de données toujours plus rapides et de plus en plus d'options de communication mutuelle. Déjà en 2004, lors du développement du réseau FlexRay, les constructeurs automobiles se sont rendu compte qu'ils devaient emprunter une nouvelle voie en termes de communication entre les différentes unités de contrôle. La taille des mises à jour logicielles a commencé à devenir incontrôlable et, avec la vitesse du HS CAN utilisé à l'époque, une mise à jour prenait littéralement des dizaines d'heures. Impraticable pour le garage bien sûr.
La solution est apparue en 2008 sous la forme d'une passerelle centrale, qui avait non seulement pour tâche d'échanger des données entre les différents réseaux CAN, FlexRay et MOST (Media Oriented Systems Transport) existants, mais servait également d'interface avec le monde extérieur pour diagnostic et programmation (mises à jour logicielles, etc.). BMW a été le premier à proposer une telle nouvelle passerelle centrale.
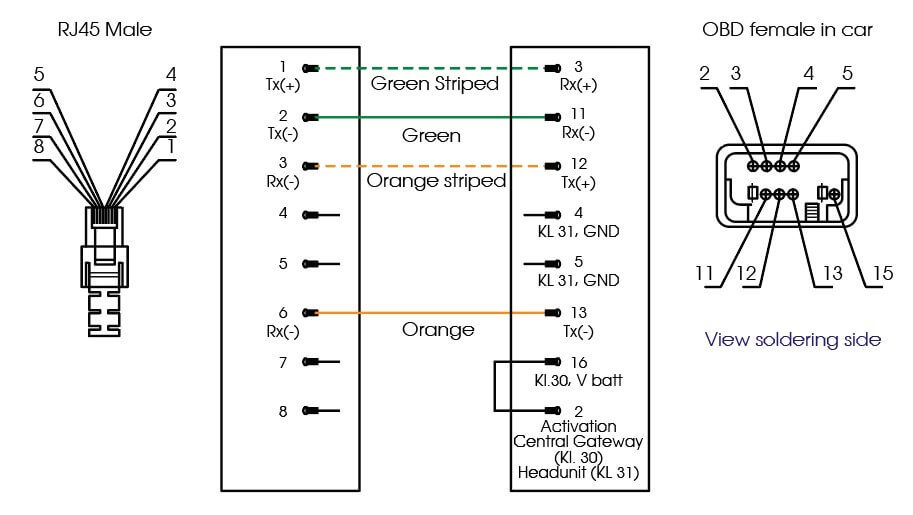
Figure : Les broches 3, 11, 12 et 13 du port OBDII sont utilisées pour communiquer avec le monde extérieur via une connexion Ethernet.
Le port OBDII ne disposait donc plus de deux lignes CAN pour permettre aux équipements du concessionnaire de communiquer avec la voiture, mais de quatre lignes Ethernet, qui correspondent exactement au connecteur RJ-45 que l'on connaît si bien grâce à l'Ethernet dans les réseaux informatiques. Les broches 3, 11, 12 et 13 du port OBDII servent donc à communiquer avec le monde extérieur via une connexion Ethernet.
Norme Ethernet automobile : 100BASE-T1
Bien entendu, la technologie Ethernet existait depuis un certain temps. Mais il n'y avait aucune application pour l'industrie automobile en raison des exigences très strictes concernant les puces et autres composants électroniques. Jusqu'en 2004, Ethernet n'avait jamais été utilisé dans les véhicules et une toute nouvelle gamme de puces, semi-conducteurs et commutateurs a donc dû être développée spécifiquement à ces fins. Et le câblage était également un défi, car pour plusieurs raisons, on souhaitait atteindre 100 Mbps sur un câble à paire torsadée non blindée (un câble comme CAN et FlexRay). Finalement, cela a abouti à une nouvelle norme Ethernet spécifiquement pour l'industrie automobile : 100BASE-T1. Celui-ci a été introduit en 2013 et avait un débit de données de 50 Mbps. En 2020, le 1000BASE-T1 a été introduit, qui peut fournir un débit de données de 1 000 Mbps (1 Gbps). Nous travaillons déjà dur pour atteindre des vitesses de 50 Gbps.
Possibilités pour l'avenir
Ethernet étant devenu omniprésent dans la vie quotidienne, les possibilités sont désormais infinies. La technologie informatique des PC, ordinateurs portables et tablettes d'aujourd'hui peut également être mise en œuvre dans les véhicules avec l'arrivée de l'Ethernet automobile. Cela signifie également que la puissance de calcul graphique pour la conduite autonome ne pose plus de problème.
Pour avoir une idée claire de la transformation de l’architecture du réseau, il est nécessaire de comprendre comment la communication est organisée dans les véhicules actuels (3e génération). Dans l'image ci-dessous, la passerelle centrale est représentée par le plus grand bloc violet. Les petits blocs verts sont des unités de contrôle qui disposent chacune de leur propre réseau de communication : LIN, CAN ou FlexRay.
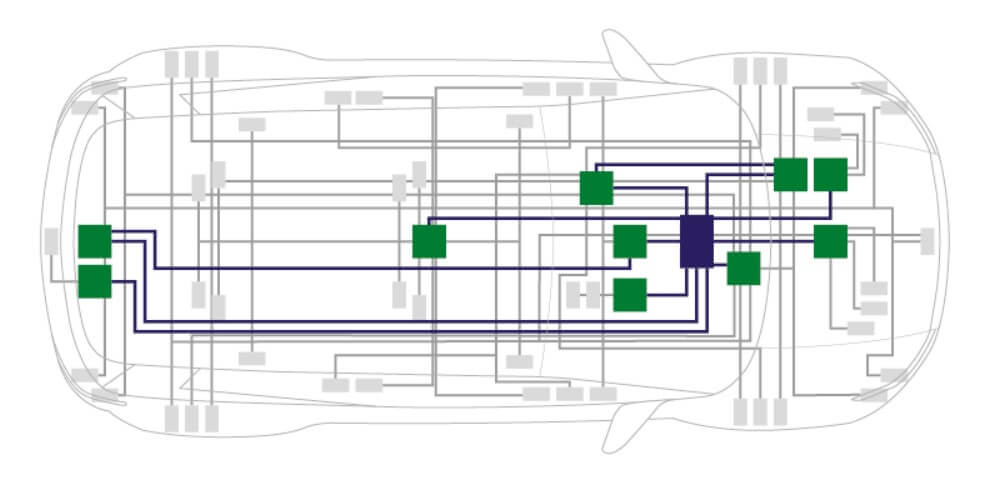
Image : Architecture du réseau de communication dans les véhicules actuels (3e génération)